Введение в ПЛК: что такое программируемый логический контроллер

 Программируемым логическим контроллерам уже 50 лет, но без них и сейчас невозможно представить автоматизированное производство. Начинаем публиковать цикл статей о ПЛК и об электронных компонентах, производимых компанией Texas Instruments для создания современных ПЛК.
Программируемым логическим контроллерам уже 50 лет, но без них и сейчас невозможно представить автоматизированное производство. Начинаем публиковать цикл статей о ПЛК и об электронных компонентах, производимых компанией Texas Instruments для создания современных ПЛК.
Программируемые логические контроллеры (ПЛК) широко применяются в сфере промышленной автоматизации разнообразных технологических процессов на больших и малых предприятиях. Популярность контроллеров легко объяснима. Их применение значительно упрощает создание и эксплуатацию как сложных автоматизированных систем, так и отдельных устройств, в том числе — бытового назначения. ПЛК позволяет сократить этап разработки, упрощает процесс монтажа и отладки за счет стандартизации отдельных аппаратных и программных компонентов, а также обеспечивает повышенную надежность в процессе эксплуатации, удобный ремонт и модернизацию при необходимости.
Принято считать, что задача создания прообраза современного ПЛК возникла в конце 60-х годов прошлого столетия. В частности, в 1968 году она была сформулирована руководящими специалистами General Motors. Тогда эта компания пыталась найти замену для сложной релейной системы управления. Согласно полученному заданию на проектирование, новая система управления должна была отвечать таким критериям как:
Последующие разработки в General Motors, Allen-Bradley и других компаниях привели к созданию системы управления на базе микроконтроллеров, которая анализировала входные сигналы от технологических датчиков и управляла электроприводами исполнительных устройств.
Термин ПЛК (Programmable Logic Controller, PLC) впоследствии был определен в стандартах EN 61131 (МЭК 61131). ПЛК – это унифицированная цифровая управляющая электронная система, специально разработанная для использования в производственных условиях. ПЛК постоянно контролирует состояние устройств ввода и принимает решения на основе пользовательской программы для управления состоянием выходных устройств.
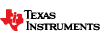
Упрощенное представление состава и принципа действия ПЛК хорошо демонстрирует рисунок 1. Из него видно, что ПЛК имеет три основные секции:

Рис. 1. Состав и принцип действия ПЛК
Имеется еще источник питания. Возможно подключение к ПЛК внешнего ПК для программирования и отладки.
Центральная секция содержит центральный процессор (ЦП), память и систему коммуникаций. Она выполняет обработку данных, принимаемых от входной секции данных, и передает результаты обработки в выходную секцию. Следует сразу отметить, что в больших ПЛК, кроме ЦП, действующего в режиме «ведущий», могут быть дополнительные «ведомые» ПЛК со своими ЦП. В качестве ЦП небольшого ПЛК используются стандартные микропроцессоры (МП). Обычно 8- и 16-разрядные МП вполне справляются со всеми стандартными задачами. Но, как отмечено в МЭК 61131, выбор конкретного МП все же зависит от задач, возлагаемых на данный тип ПЛК.
Для передачи данных другому ПЛК или для подключения к сетям передачи данных PROFIBUS, Industrial Ethernet, AS-Interface в распределенных системах управления сегодня используются коммуникационные процессоры, такие как DP83867IR производства Texas Instruments (TI).
Входная секция ПЛК обеспечивает ввод в центральную секцию состояния переключателей, датчиков и смарт-устройств. Через выходную секцию ЦП управляет внешними исполнительными устройствами, среди которых могут быть электромагнитные пускатели моторов, источники света, клапаны и смарт-устройства.
Типы ПЛК
Современные ПЛК, использующие инновационные технологии, далеко ушли от первых упрощенных реализаций промышленного контроллера, но заложенные в систему управления универсальные принципы были стандартизированы и успешно развиваются уже на базе новейших технологий.
Крупнейшими мировыми производителями ПЛК сегодня являются компании Siemens AG, Allen-Bradley, Rockwell Automation, Schneider Electric, Omron. Кроме них ПЛК выпускают и многие другие производители, включая российские компании ООО КОНТАР, Овен, Сегнетикс, Fastwel Групп, группа компаний Текон и другие.

Рис. 2. Моноблочные программируемые логические контроллеры
По конструктивному исполнению ПЛК делят на моноблочные (рисунок 2) и модульные. В корпусе моноблочного ПЛК наряду с ЦП, памятью и блоком питания размещается фиксированный набор входов/выходов. В модульных ПЛК используют отдельно устанавливаемые модули входов/выходов. Согласно требованиям МЭК 61131, их тип и количество могут меняться в зависимости от поставленной задачи и обновляться с течением времени. ПЛК подобной концепции представлены на рисунке 3. Подобные ПЛК могут действовать в режиме «ведущего» и расширяться «ведомыми» ПЛК через интерфейс Ethernet.

Рис. 3. Программируемые логические контроллеры с расширенными возможностями
Моноблочные функционально завершенные ПЛК могут включать в себя небольшой дисплей и кнопки управления. Дисплей предназначен для отображения текущих рабочих параметров и вводимых с помощью кнопок команд рабочих программ и технологических установок. Более сложные ПЛК комбинируются из отдельных функциональных модулей, совместно закрепляемых на стандартной монтажной рейке. В зависимости от количества обслуживаемых входов и выходов, устанавливается необходимое количество модулей ввода и вывода.
Источник питания может быть встроенным в основной блок ПЛК, но чаще выполнен в виде отдельного блока питания (БП), закрепляемого рядом на стандартной рейке. Блок питания небольшой мощности представлен на рисунке 4.

Рис. 4. Блок питания для ПЛК
Первичным источником для БП чаще всего служит промышленная сеть 24/48/110/220/400 В, 50 Гц. Другие модели БП могут использовать в качестве первичного источник постоянного напряжения на 24/48/125 В. Стандартными для промышленного оборудования и ПЛК являются выходные напряжения БП: 12, 24 и 48 В. В системах повышенной надежности возможна установка двух специальных резервированных БП для дублирования электропитания.
Для сохранения информации при аварийных отключениях сети электропитания в ПЛК используют дополнительную батарею.
Как известно, первоначальная концепция программируемого логического контроллера сформировалась во времена перехода с релейно-транзисторных систем управления промышленным оборудованием на появившиеся тогда микроконтроллеры. Подобные ПЛК с 8- и 16-разрядными МП ограниченной производительности до сих пор успешно эксплуатируются и находят новые сферы применения.
Огромный прогресс в развитии микроэлектроники затронул всю элементную базу ПЛК. У них значительно расширился диапазон функциональных возможностей. Несколько лет назад немыслимы были аналоговая обработка, визуализация технологических процессов или даже раздельное использование ресурсов ЦП в качестве непосредственного управляющего устройства. В настоящее время поддержка этих функций входит в базовую версию многих ПЛК.
Примером подобного подхода является отдельное направление в линейке продукции компании Texas Instruments. Как известно, TI не входит в число производителей ПЛК, но выпускает для них специализированные ЦП и сетевые процессоры, компоненты для создания периферийных цифровых и аналоговых модулей, контроллеры температуры, смешанные модули цифровых и аналоговых входов/выходов.
Блок схема процессора TI Sitara AM570x на рисунке 5 позволяет судить об огромной функциональной оснащенности этого ARM-процессора, работающего на частоте до 1 ГГц, поддерживающего интерфейсы CAN, I²C, McASP, McSPI, SPI, UART, USB и способного работать в диапазоне температур 0…90°С.

Рис. 5. Блок-схема процессора TI Sitara AM570x
Требования, ограничения и проблемы при проектировании и производстве ПЛК
Таким образом, становится понятно, что ПЛК — это просто особым образом спроектированная цифровая система управления на основе процессоров разной мощности и с различной функциональной оснащенностью, в зависимости от предназначения. Такую систему можно также считать специализированным мини-компьютером. Причем она изначально ориентирована на эксплуатацию в цехах промышленных предприятий, где имеется множество источников электромагнитных помех, а температура может быть как положительной, так и отрицательной. Дополнительно к минимизации воздействия вышеуказанных факторов необходимо предусмотреть и защиту от агрессивной внешней среды, включающей пыль, брызги технологических жидкостей и паровоздушные взвеси. В таких случаях предусмотрена установка ПЛК в защитные шкафы или в удаленных помещениях. Отдельные модули могут размещаться на удалении до сотен метров от основного комплекта ПЛК и эксплуатироваться при экстремальных внешних температурах. Согласно МЭК 61131, для ПЛК с наружной установкой допустима температура 5…55°C. Для устанавливаемого в закрытых шкафах ПЛК необходимо обеспечить рабочий диапазон 5…40°C при относительной влажности 10…95% (без образования конденсата).
Тип ПЛК выбирается при проектировании системы управления и зависит от поставленных задач и условий производства. В отдельных случаях это может быть моноблочный ПЛК с ограниченными функциями, имеющий достаточное количество входов и выходов. В других условиях потребуются ПЛК с расширенными возможностями, позволяющими использовать распределенную конфигурацию с удаленными модулями входа/выхода и с удаленными пультами управления технологическим процессом.
Связь между удаленными блоками и основным ядром ПЛК осуществляется через помехозащищенные полевые шины по медным кабелям и оптическим линиям связи. В отдельных случаях, например, для связи с подвижными объектами, применяют беспроводные технологии, чаще всего это сети и каналы Wi-Fi. Для взаимодействия с другими ПЛК могут применяться как широко известные интерфейсы RS-232 и RS-485, так и более помехозащищенные промышленные варианты типа Profibus и CAN.
Особенности работы и программирования ПЛК
Теперь, когда стали более понятными основные возможности ПЛК, следует выяснить способы их применения.
Система программирования является одной из примечательных и полезных особенностей ПЛК, она обеспечивает упрощенный подход к разработке управляющих программ для специалистов различного профиля.
Именно в ПЛК впервые появилась удобная возможность программирования контроллеров путем составления на экране компьютера визуальных цепей из релейных контактов для описания операторов программы (рисунок 6). Таким образом, даже весьма далекие от программирования инженеры-технологи быстро осваивают новую для себя профессию. Подобное программирование называют языком релейной логики или Ladder Diagram (LD или LAD). Задачи, решаемые при этом ПЛК, значительно расширяются за счет применения в программе функций счетчиков, таймеров и других логических блоков.

Рис. 6. Пример программной реализации электрической цепи
Задача программирования ПЛК еще более упрощается благодаря наличию пяти языков, стандартизованных для всех платформ ПЛК. Три графических и два текстовых языка программирования взаимно совместимы. При этом одна часть программы может создаваться на одном языке, а другая — на другом, более удобном для нее.
К графическим средствам программирования ПЛК относятся язык последовательных функциональных блоков (Sequential Function Chart, SFC) и язык функциональных блоковых диаграмм (Function Block Diagram, FBD), более понятные для технологов. Для программистов более привычными являются язык структурированного текста (Statement List, STL), напоминающий Паскаль, и язык инструкций (Instruction List, IL), похожий на типичный Ассемблер.
Конечно, простота программирования ПЛК является относительной. Если с программированием небольшого устройства может после обучения справиться практически любой инженер, знакомый с элементарной логикой, то создание сложных программ потребует знания основ профессии программиста и специальных познаний в программировании ПЛК.
Упростить создание программного обеспечения для современных ПЛК позволяют специальные комплексы, такие как
(рисунок 7), ISaGRAF, OpenPCS и другие инструменты, не привязанные к какой-либо аппаратной платформе ПЛК и содержащие все необходимое для автоматизации труда программиста. Для отладки сложных проектов на основе компонентов TI компания предлагает специальные отладочные комплекты и необходимое программное обеспечение.

Рис. 7. Рабочий экран программирования в среде CoDeSys
Перед началом работы ПЛК выполняет первичное тестирование оборудования и загрузку в ОЗУ и ПЗУ операционной системы и рабочей программы пользователя. Стандартный ПЛК кроме рабочего режима имеет режим отладки с пошаговым выполнением программы, с возможностью просмотра и редактирования значений переменных.
Рабочий режим ПЛК состоит из повторяющихся однотипных циклов, каждый из них включает три этапа:
Процесс исполнения программы ПЛК можно контролировать на экране подключенного компьютера с отображением состояния отдельных параметров. Например, процедуры включения и выключения насоса могут меняться в зависимости от требуемой задержки, значение которой задается специальной переменной.
При необходимости можно остановить выполнение программы и перевести ПЛК в режим программирования, затем на экране компьютера изменить ход выполнения программы или отдельные параметры и снова записать их в память ПЛК.
Заключение
Современный ПЛК стал чрезвычайно востребованным универсальным рабочим инструментом в системах автоматизации производственных процессов, а также для управления отдельными устройствами различного назначения. Это особый тип программируемых логических автоматов, отличающийся повышенной надежностью, легко встраиваемый и модернизируемый, способный длительное время работать практически без обслуживания.
Начинаем изучать STM32: Что такое регистры? Как с ними работать?
Продолжаем рассмотрение базовых вопросов
В предыдущем уроке мы рассмотрели работу с битовыми операциями и двоичными числами, тем самым заложив основу для рассмотрения новой темы. В этом уроке мы с Вами рассмотрим очередной вопрос: что такое регистры и как с ними работать?

Память и регистры
Одним из самых важных навыков необходимых при работе с микроконтроллерами является умение взаимодействовать с регистрами. Давайте для себя разберемся, что же это такое?
В целом, регистр — это особый вид памяти внутри микроконтроллера, который используется для управления процессором и периферийными устройствами. Каждый регистр в архитектуре ARM представляет собой ячейку памяти и имеет длину в 32 бита, где каждый бит можно представить в виде крошечного выключателя с помощью которого осуществляется управление тем или иным параметром микроконтроллера.
Каждый из регистров имеет свой порядковый номер – адрес. Адрес регистра обозначается 32-битным числом представленным в шестнадцатеричной системе счисления. Путём записи по адресу регистра определённой комбинации единиц и нулей, которые обычно представлены в шестнадцатеричном виде, осуществляется настройка и управление тем или иным узлом в МК. Вспомним, что в программе для работы с битовыми операциями, мы могли представить в виде шестнадцатеричного числа произвольный набор единиц и нулей. В целом стоит отметить, что существует два вида регистров: регистры общего назначения и специальные регистры. Первые расположены внутри ядра МК, а вторые являются частью RAM-памяти.
Так же стоит отметить, что Reference Manual, который мы скачивали в первом уроке, это один большой справочник по регистрам, содержащимся в целевом микроконтроллере, а библиотека CMSIS позволяет нам оперировать символьными именами регистров вместо числовых адресов. Например, к регистру 0x40011018 мы можем обратиться просто, используя символьное имя GPIOC_BSSR. Конкретные примеры конфигурирования мы рассмотрим в ходе разбора нашей программы из первого занятия.
Итак, обычно структура регистра описывается в виде небольшой таблицы с указанием:
Разбор кода из первого занятия
Итак, давайте вспомним задачу, которую мы решили на первом уроке используя готовый код примера: нам было необходимо написать программу, которая бы обеспечила попеременное включение двух светодиодов на плате Discovery (возможно и не двух, если у вас другая версия платы Discovery) с временным интервалом.
Давайте еще разок взглянем на код программы, которую мы использовали для того, чтобы заставить наш МК дрыгать двумя ногами на которых расположены наши светодиоды:
Первым делом, при работе с STM32, даже для такой простой задачи как включение и выключение светодиода нам необходимо предварительно ответить на ряд вопросов:
Куда подключены наши светодиоды? К какому выводу микроконтроллера?
Для того, чтобы посмотреть где что находится на плате Discovery, а в частности, нужные нам светодиоды — нужно открыть Schematic-файл, либо тот который мы скачали с сайта ST, либо прямо из Keil:
Открыв Schematic мы увидим схему всего того, что есть на плате — схему ST-Link, обвязку всей периферии и многое другое. На текущий момент нас интересуют два светодиода, ищем их обозначение:
Как мы видим, наши светодиоды подключены к порту GPIOC на 8 и 9 пин.
Как включить тактирование на нужный порт GPIO?
В целом, любая работа с периферией в микроконтроллерах STM32 сводится к стандартной последовательности действий:
Внимание! Вопрос касательно системы тактирования, её настройки и использования мы подробно рассмотрим в отдельной статье.
Найти к какой шине подключен наш порт GPIOC можно найти в Datasheet’е на наш МК в разделе Memory Mapping в Таблице 16. STM32F051xx peripheral register boundary addresses.
Как вы уже успели заметить, необходимая нам шина именуется как AHB2. Для того чтобы подробнее ознакомиться с регистром, в котором включается тактирование на нужный нам порт GPIO на шине AHB, надо перейти в соответствующий раздел в Reference Manual. По названию регистров мы можем определить тот, который нужен нам:
Переходим в этот пункт, и мы видим наш 32-битный регистр, его адрес смещения, значение по умолчанию, способ доступа к регистру и перечисление того, за что отвечает каждый бит в регистре.
Смотрим на таблицу и видим нечто напоминающее опции включения тактирования на портах GPIO. Переходим к описанию и находим нужную нам опцию:
Соответственно если мы установим 19 бит в значение «1» то это обеспечит включение тактирования на порт I/O C – то есть на наш GPIOC. К тому же — нам нужно включить отдельно один бит из группы, не затрагивая остальные т.к. мы не должны мешать и изменять без надобности другие настройки.
Основываясь на материалах прошлого урока, мы знаем что для того чтобы выставить определенный бит нужно используя логическую операцию «ИЛИ» сложить текущее значение регистра с маской которая содержит те биты которые необходимо включить. Например, сложим значение регистра RCC->AHBENR по умолчанию, т.е. 0x14 и число 0x80000 тем самым включим тактирование GPIOC путем установки 19 бита:
Каким образом мы можем это сделать из программы? Всё достаточно просто. В данном случае у нас два варианта:
То есть, мы могли бы обращаться к адресам регистров напрямую по адресу и написать так:
Второй вариант мне кажется наиболее привлекательным, т.к. библиотека CMSIS организована таким способом, что регистру можно обращаться, используя только его название. Препроцессор в ходе обработки текста программы перед компиляцией подставит все цифровые значения адреса регистра автоматически. Давайте разберем этот вопрос чуть подробнее.
Предлагаю открыть наш проект, который мы сделали в первом занятии, или скачайте предварительно подготовленый отсюда и удалите все содержимое программы оставив только подключенный заголовочный файл, функцию main() и инструкцию для включения тактирования (она нам понадобится для подробного разбора кода).
Наш код будет выглядеть следующим образом:
Давайте для ознакомления копнём вглубь библиотеки CMSIS.
Для того, чтобы быстро перейти к месту где объявлена та или иная константа или переменная в Keil реализована удобная функция. Кликаем правой кнопкой по необходимой нам константе, например, на RCC:
И мы переносимся в глубины библиотеки CMSIS, в которой увидим, что все регистры доступные для управления программным способом имеют вид TypeDef-структур, в том числе и наш RCC:
Провалившись подобным образом в RCC_TypeDef мы увидим структуру в которой описаны все поля нашего регистра:
Соответственно, мы можем спокойно обращаться к нужному нам регистру записью вида PERIPH_MODULE->REGISTER и присваивать ему определенное значение.
Помимо мнемонического обозначения регистров есть так же обозначения конкретных битов. Если мы провалимся к объявлению параметра RCC_AHBENR_GPIOCEN из нашей программы, то так же увидим объявление всех параметров:
Таким образом, используя библиотеку CMSIS у нас получается лаконичная читаемая запись нужного нам параметра в регистр, через установку которого мы запускаем тактирование на нужный нам порт:
В качестве задания: определите используя возможности Keil, каким образом получился адрес регистра RCC->AHBENR как 0x40021014.
Как настроить нужные нам пины GPIO для того чтобы можно было включить светодиод?
Итак, мы знаем что нужные нам светодиоды подключены к порту GPIOC к пинам PC8 и PC9. Нам нужно настроить их в такой режим, чтобы загорался светодиод. Хотелось бы сразу же сделать оговорку, что порты GPIO мы рассмотрим подробнее в другой статье и тут мы сконцентрируемся именно на работе с регистрами.
Первым делом нам нужно перевести режим работы пинов PC8 и PC9 в режим Output. Остальные параметры порта можно оставить по умолчанию. Переходим в Reference Manual в раздел 9. General-purpose I/Os (GPIO) и открываем пункт отвечающий за режим работы пинов порта GPIO и видим что за этот параметр отвечает регистр MODER:
Судя по описанию, для установки пинов PC8 и PC9 в режим Output мы должны записать 01 в соответствующие поля регистра GPIOC.
Это можно сделать через прямую установку с помощью числовых значений:
Или через использование определений из библиотеки:
После данной инструкции наши пины PC8 и PC9 перейдут в режим Output.
Как включить светодиод?
Если мы обратим внимание на список доступных регистров для управления портом GPIO то можем увидеть регистр ODR:
Каждый из соответствующих битов отвечает за один из пинов порта. Его структуру вы можете увидеть ниже:
Для того, чтобы обеспечить попеременную смену состояний светодиодов надо с определенным временным интервалом включать/выключать 8 и 9 биты. То есть попеременно присваивать регистру значение 0x100 и 0x200.
Сделать это мы можем через прямое присвоение значений регистру:
Можем через использование определений из библиотеки:
Но так как микроконтроллер работает очень быстро — мы не будем замечать смены состояний светодиодов и визуально будет казаться что они оба горят постоянно. Для того чтобы они действительно моргали попеременно мы внесем искусственную задержку в виде цикла который займет МК бесполезными вычислениями на некоторое время. Получится следующий код:
На этом первоначальное знакомство с регистрами и методами работы с ними мы можем закончить.
Проверка результатов работы нашего кода
Небольшое приятное дополнение в конце статьи: в Keil имеется отличный Debug-инструмент с помощью которого мы можем пошагово выполнить нашу программу и просмотреть текущее состояние любого периферийного блока. Для этого после загрузки прошивки после компиляции мы можем нажать кнопку Start Debug Session:
Рабочая среда Keil переключится в режим отладки. Мы можем управлять ходом программы с помощью данных кнопок:
И есть еще одна удобная функция работы с периферией в режиме отладки, она позволяет просматривать текущее состояние регистров и менять их состояние простым кликом мышкой.
Для того чтобы ей воспользоваться — нужно перейти в соответствующий периферийный блок и справа откроется окно с указанием регистров и их значением.
Если вы кликните по одному из пунктов данного меню, вы увидите адрес регистра и его краткое описание. Так же можно просмотреть описание к каждому отдельному параметру регистра:
Попробуйте самостоятельно пошагово выполнить программу, включить/выключить светодиоды не используя программу, а используя данный режим работы с микроконтроллером. Простор для фантазии тут обширный. Так же попробуйте поиграться с длительностями задержек, сделайте одновременное моргание обоими светодиодами. В общем экспериментируйте! )